Toy Robot Design
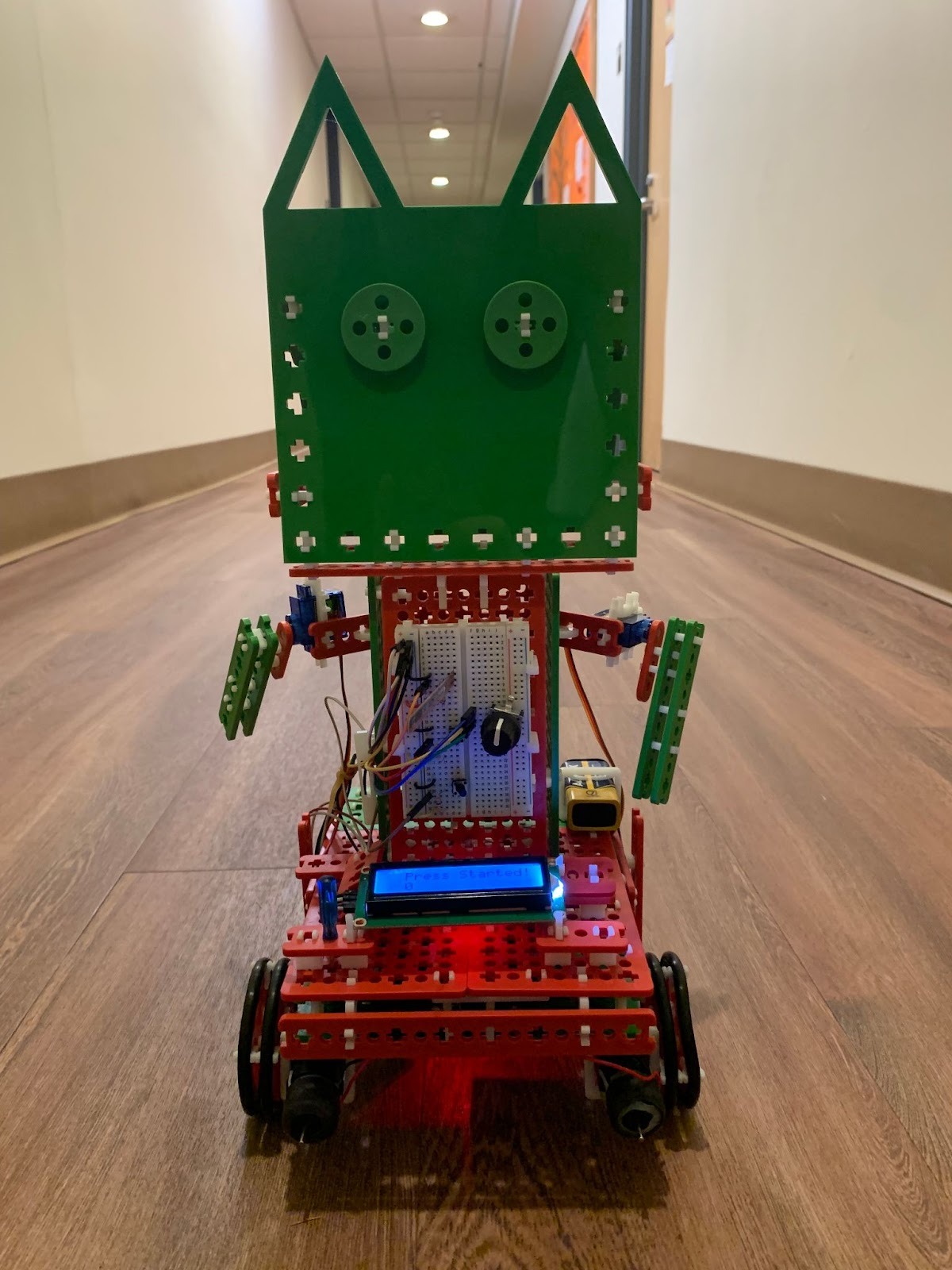
Designed and developed an Arduino toy robot equipped with servo motors, LCD display, flex sensor and rotary encoder to allow the robot to respond to the user’s actions.
Arduino Programmer · September 2024 – December 2024 · Team of 4
RoboticsArduino
What I Owned
Sensors, Servo Motors, Plastic Frame
Contributions
Helped model the general design of the robot with initial sketches and wrote Arduino code for the robot to function.
Requirement: The robot must provide an instruction to the user to perform an action on a sensor in a given time frame. Must also have an internalized point keeping system on the number of completed actions. The robot would dance if the user achieved a point threshold.
Result: The robot was able to keep track of number of points and the sensors worked as expected.
Documents
Risks & Limitations
- • There is lag in the log when a sensor gets triggered
- • Sometimes the Arduino Code doesn't work at intended. An example being the servo motors not turning when instructed.
Lessons & Next Steps
- • Would like to use more self made parts
- • Stronger motor used
- • Would like to move the housing of the components inside chassis instead outside