RATS: Rotational Antenna Tracking System
Designed an automated, two-axis tracking antenna and containerized mission control system designed to maintain a high-bandwidth RF link and visualize high-frequency rocket telemetry in real time.
Telemetry & Hardware Lead · Oct 2025 - Present · Team of 3
Contributions
Architected the backend IoT telemetry pipeline and physical network infrastructure to ingest and log 10Hz flight data with zero-touch deployment capabilities.
▾Result
The pipeline successfully achieves <50ms latency from hardware to database. Running docker compose up instantly provisions the server, auto-configuring TimescaleDB schemas and EMQX SQL routing rules seamlessly.
Engineered real-time digital signal processing queries and comprehensive mission control Grafana dashboards for live flight monitoring.
▾Result
Grafana renders live maps and 10Hz dynamic graphs seamlessly. Mach and drift calculations are proven mathematically accurate and visually stable against a custom Python telemetry simulator I wrote to inject mock flight data and stress-test the MQTT-to-database pipeline.
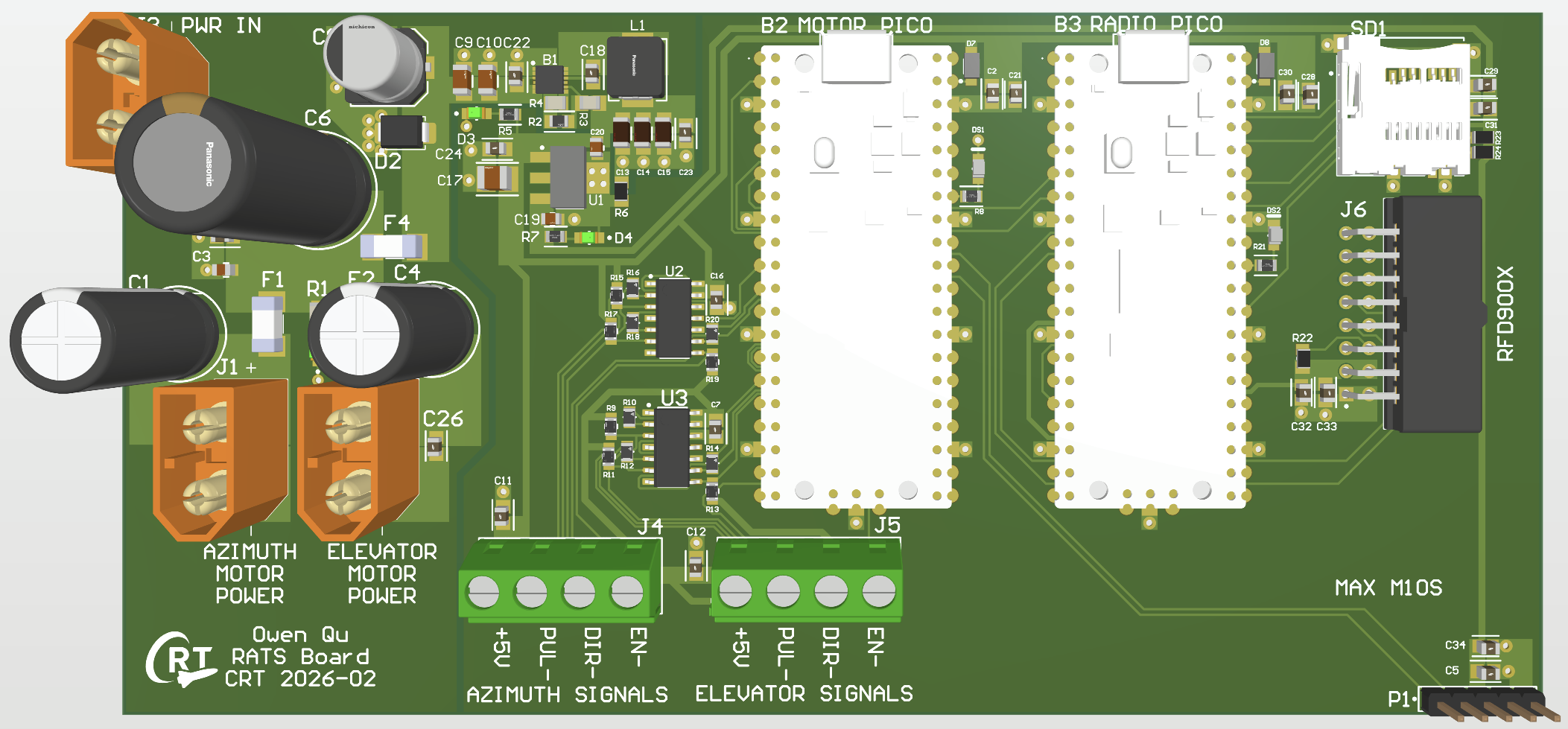
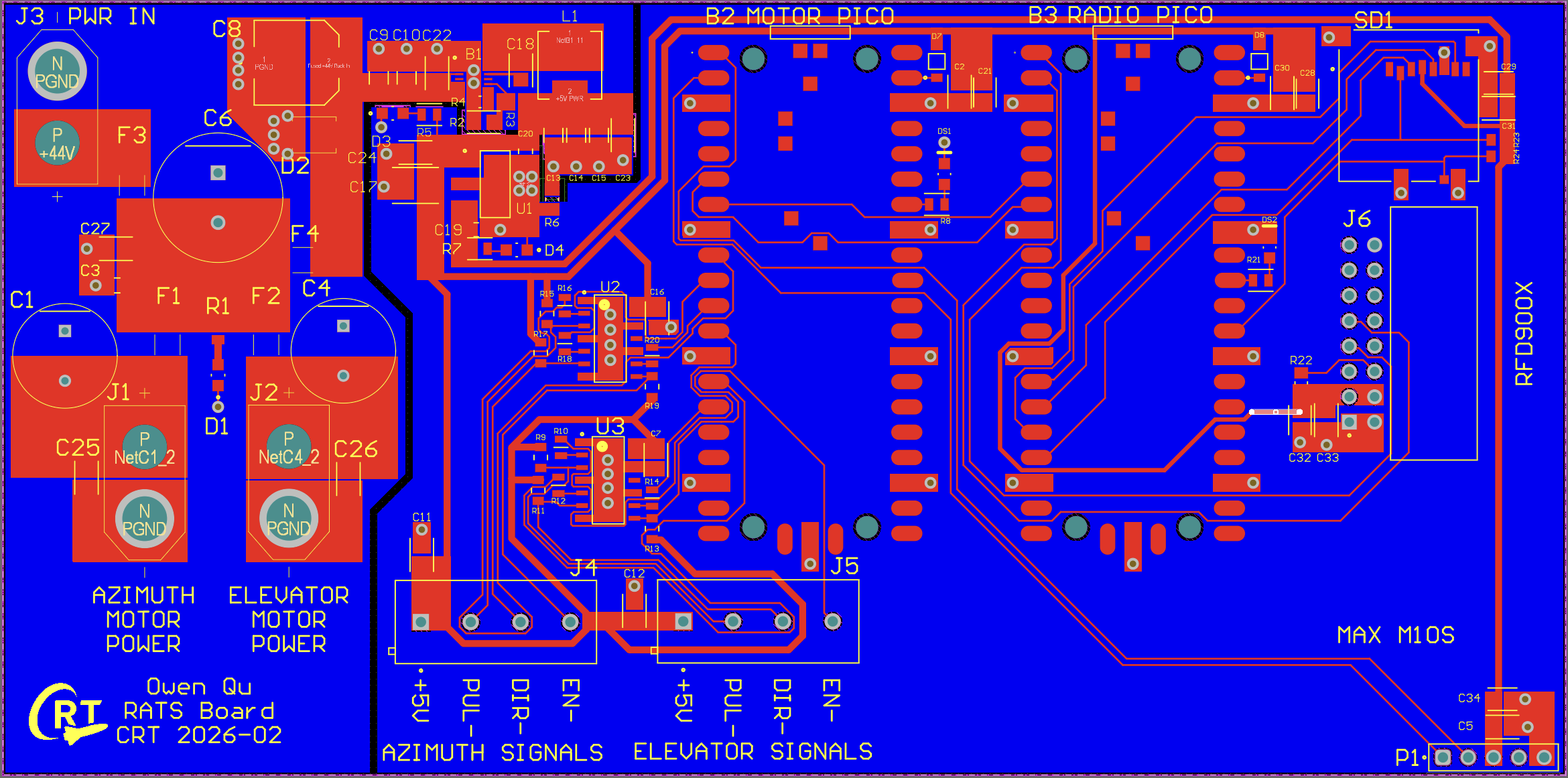
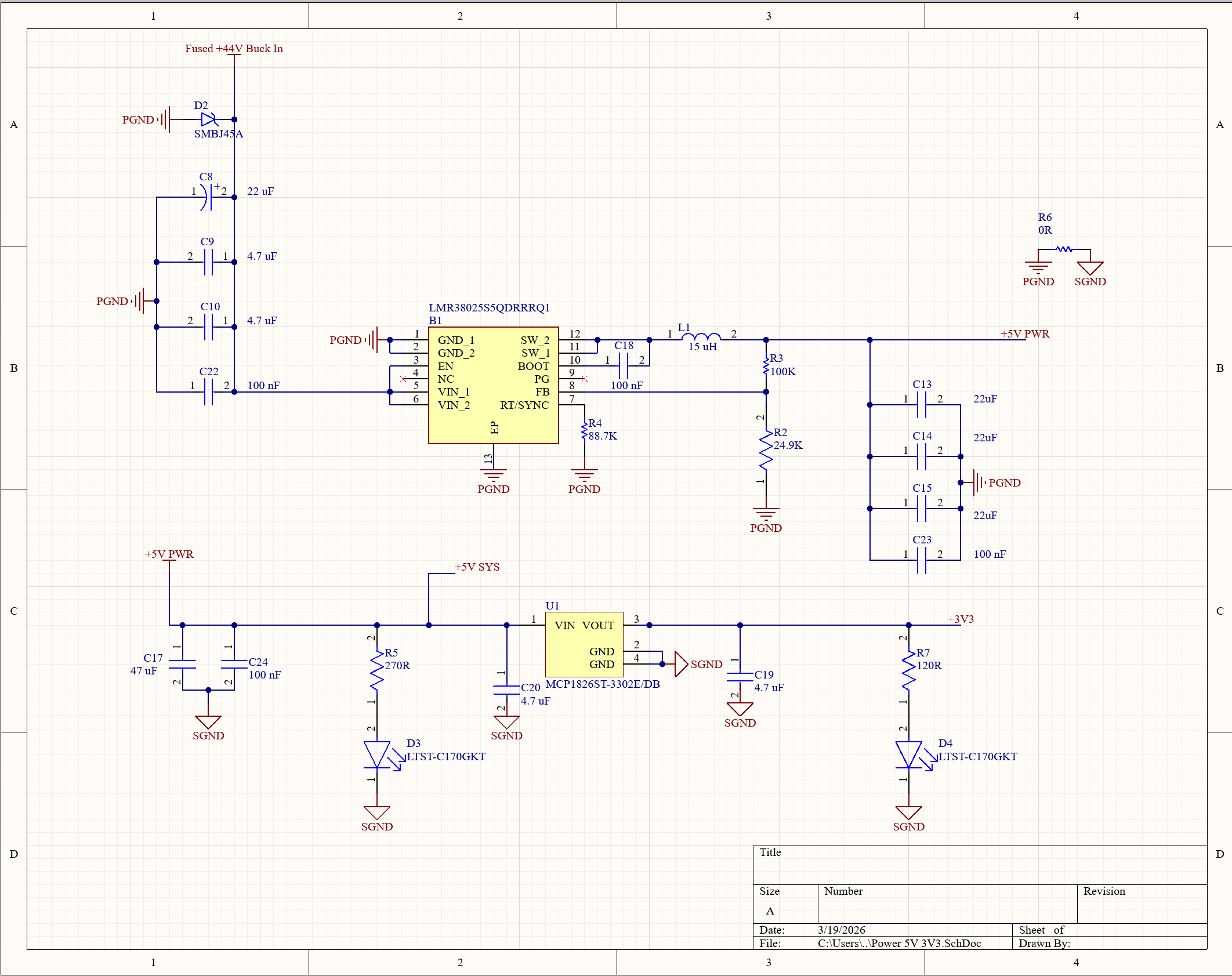
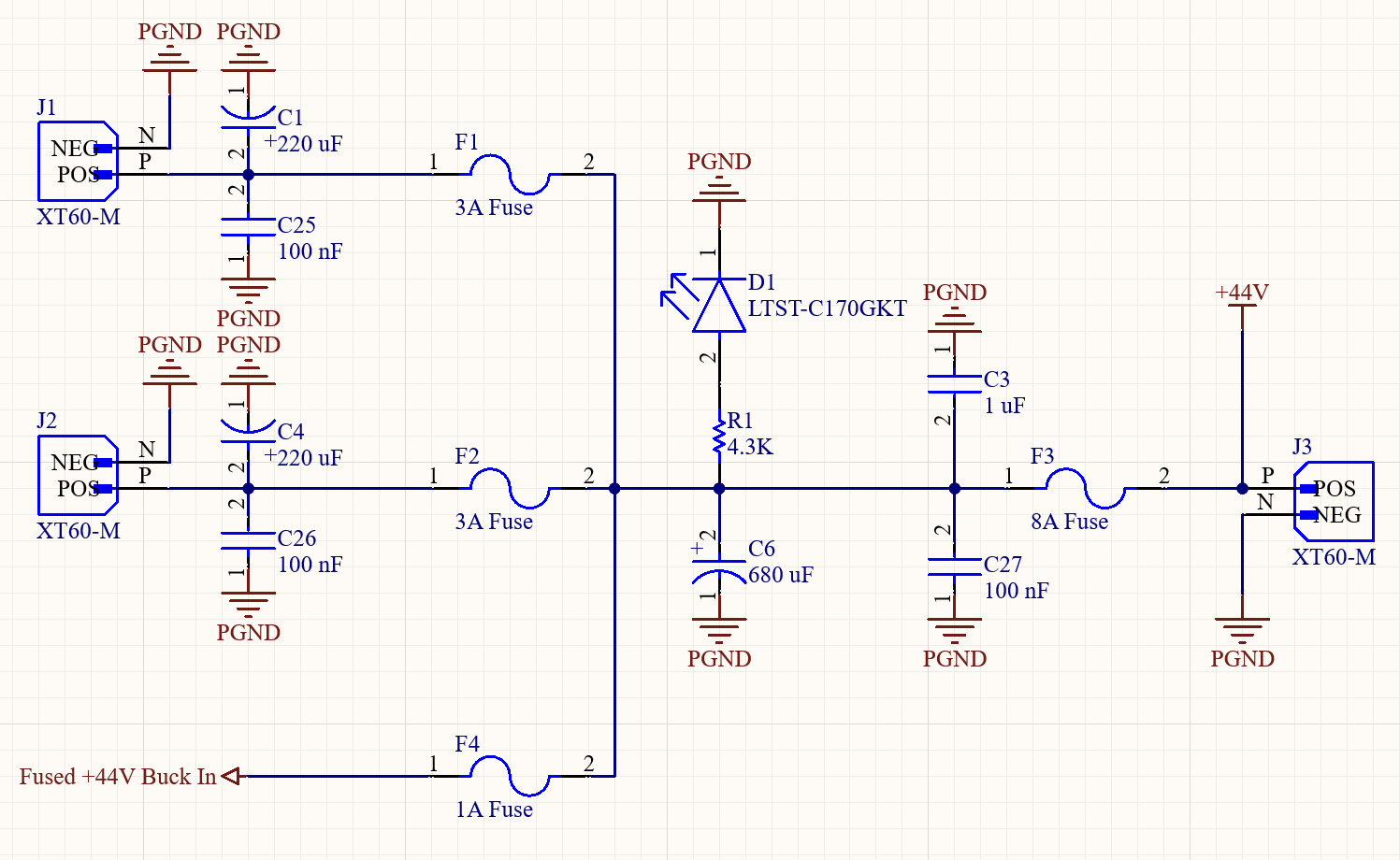
Designed a custom mixed-signal PCB capable of distributing 44V/48V high-current motor power alongside sensitive 3.3V/5V RF and logic circuits without interference.
▾Result
Power routing, fusing strategy, and ground plane separation pass initial schematic DRC and layout clearance checks. The star ground topology successfully isolates the high-power domain from the logic domain in the physical layout, theoretically eliminating ground loops.
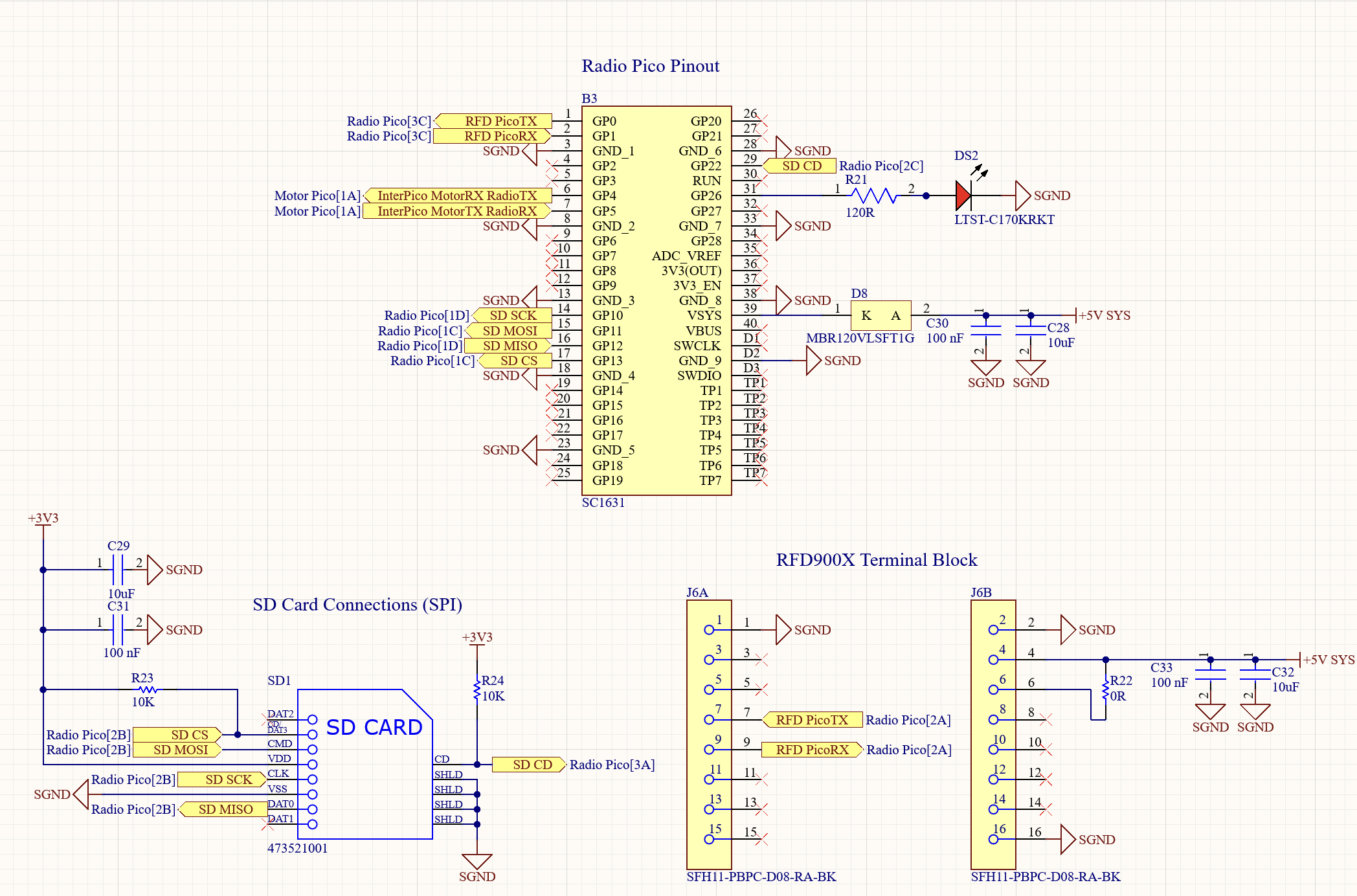
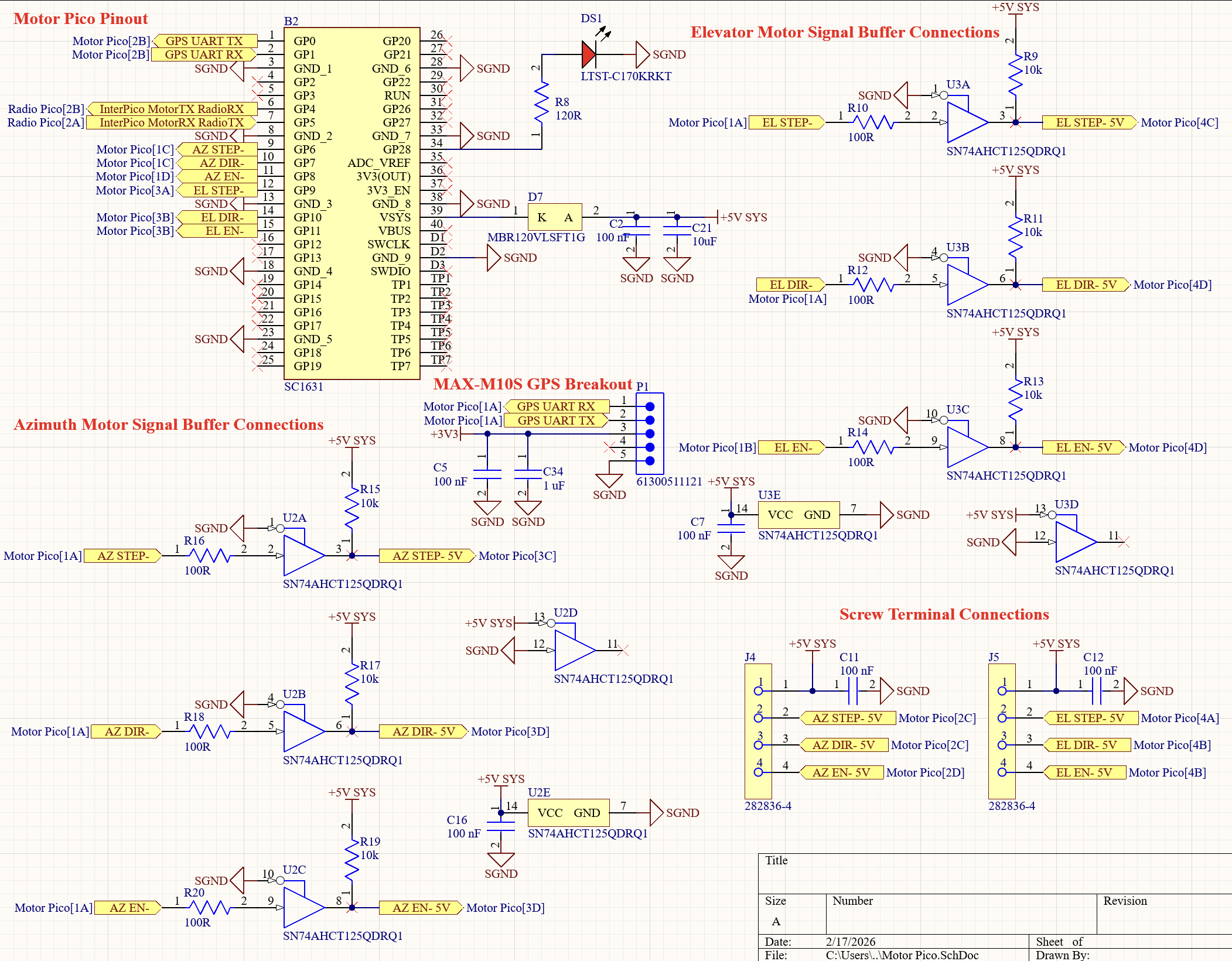
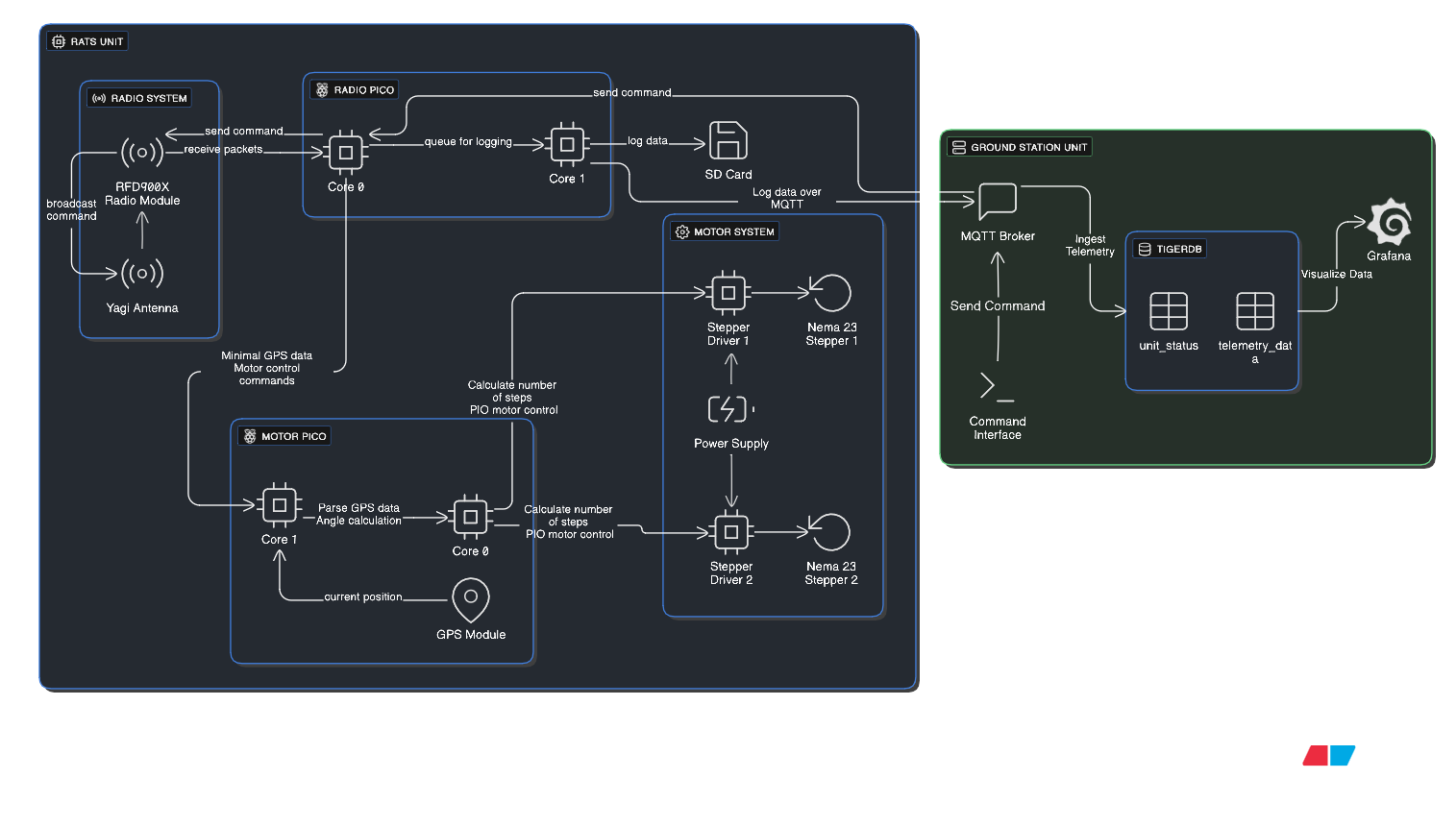
Implemented a dual-microcontroller hardware architecture utilizing two Raspberry Pi Picos to decouple hard-real-time motor kinematics from asynchronous RF telemetry processing.
▾Result
Schematic logic is fully defined, ensuring safe voltage translation to the motor drivers and correct pin mapping for all hardware SPI/UART peripherals. The architecture theoretically eliminates blocking delays between communications and kinematics.
Interfaces
| From | To | Type | Description |
|---|---|---|---|
| Radio Pico | Motor Pico | electrical | Hardwired UART inter-board link passing decoded GPS targets and tracking vectors to decouple RF processing from motor kinematics. |
| Motor Pico | External Stepper Drivers | electrical | 3.3V PIO logic signals (Step, Direction, Enable) shifted to clean 5V for robust motor driver triggering. |
| Radio Pico | Ground Station | data | Ground station WiFi connection enables streaming telemtry data directly into ground station's EMQX MQTT message broker. |
| Fill Station | Ground Station | data | High-bandwidth wireless bridge carrying physical pad sensor states and zero-latency go2rtc camera feeds into TimescaleDB and Grafana. |
Documents
.png)
Demonstration with mock data

Limitations
- • PCB design, layout, and assembly are complete, but comprehensive bench testing is pending.
- • True Hardware-in-the-Loop testing of ground station has not been conducted.
- • Real-world RF multipath fading and environmental packet loss metrics at high altitudes have not yet been characterized.
Lessons & Next Steps
- • Investing the time upfront to build the mission control backend entirely as Infrastructure as Code (Docker Compose) saved countless hours during field deployment testing.
- • If I were to do this again, I'd try to stick to a more uniform component list for my hardware design - having over 80 unique components on a single board is not easy to manage, both in terms of handling inventory and assembly.